昨天阅读survey之后,今天继续阅读编译优化论文一篇。是MLSys会议上的论文。这个会上全是一些深度学习+系统的文章,好像国内知名度不是很高,甚至不再CCF推荐列表上 ……
说回本文,本文最后一个作者是陈天奇,TVM的作者,之前我看了他的经历,挺受鼓舞的,推荐大家都可以看一下~
由于这个方向我了解甚少,这篇论文还是精度,笔记也做得详细一点。
摘要
在计算密集的负载下得到高效率的计算是很难的问题。目前解决办法:
- vendor libraries:需要大量工程开发
- auto-schedulers:只支持确定形状。否则scheduler速度会变的非常慢。
作者观察到只支持确定形状的瓶颈在于:搜索空间是和形状有关的。作者提出新方法,可以构建一个形状无关的搜索空间,在同一空间中、用同样的cost model来同时搜索所有形状。
实验表明,新方法的速度和效果均大幅超越SOTA。
Introduction
随着DL大规模应用,成本变得很高。\(5\%\)的性能提升可能要多花4000$。
然而,提升所有算子的效果很难,需要详细的实验、开发。很多研究者应用oneDNN,cuDNN等vendor library。后者的开发时间和更新周期都很长。(一年一更)
为了解决这个问题,多种auto-schedule负责进行High-level IR计算定义和Low-level IR实现之间的过程。然而,现有方法都需要在计算时知道所有位置的形状,这样才能正确地构建搜索空间,考虑所有情况。
然而,很多工作需要形状不确定。一个方法是对所有形状都遍历优化一遍:
- 慢,一个BERT层需要42h来优化
作者发现,如果把想同类型、不同形状的算子看成一个可变形状的workload,然后只规划一次,可以显著减少计算量。已有方法不能这么做,是因为他们要对不同形状开不用的搜索空间。本文提出一种新的方法DietCode:
构建一个由micro-kernel构成的shape-generic搜索空间,每个micro-kernel都是形状不固定的。这样就能让DietCode有一个统一的搜索空间。
DietCode构建的cost-model包括:
- 复杂的shape-generic 的部分。需要从micro-kernel中提取loop feature等信息,需要从硬件上获取参数
- 简单的依赖形状的部分。不需要额外信息
本文的贡献可以归纳为:
- 提出通过构建shape-generic的搜索空间解决动态形状的规划问题
- 提出DietCode,可以同时规划所有形状,用同样的shape-generic cost model
- 在BERT模型编译中,比SOTA快5.88倍,如果考虑所有形状,快100倍。效果上比auto-schedule好\(69\%\),比库方法好\(18.6\%\)
Background
现有auto-scheduler工作流
现有的vendor library成本很高,有很多auto-scheduler来替代。
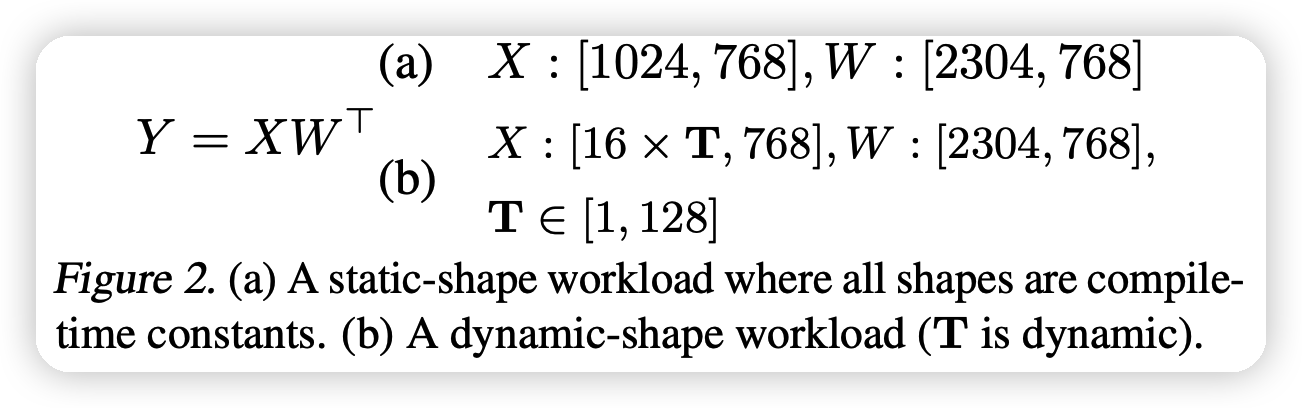
其输入如上图:包含一个tensor的表达式,同时对于tensor的形状有附加的说明。
现有方法如上图左:
- 1.通过表达式和形状信息,与硬件的可能优化方式一起构建搜索空间
- 2.通过硬件信息构建一个cost model
- 3.用某种算法进行学习
最后搜出来的方法大约比vendor-library方法快3.88倍
动态形状tensor的程序
现有方法需要:在优化时知道所有的形状信息。因此不适用于以下需求:
- NAS中,需要搜索网络超参。每组超参的实现,网络的结构都不同(举例,12800种)
- 在NLP等序列任务中,输入的长度可能运行时才能确定,比如BERT就是长度1-128
- 统一模型,不同层的维度可能都不一样:比如BERT的hidden state在不同层可能是\((768,2304,3072)\)
为什么需要新的auto-scheduler框架
现有方法加一些代码不行吗?
- 对于vendor-library:输入性状改变可能带来13倍的性能衰减。这是因为代码里有好多hard-code。改这些东西的代价很大,码量爆炸。
- 已有auto-scheduler:现有的工作流,上图左,形状信息都是焊死的。不改代码的话,只能对所有形状遍历,这个速度肯定不可行。
已有一些auto-scheduler的动态形状改进有一些问题:
- Selective tuning:把不同形状聚成一个个cluster,然后对每个cluster优化。需要额外的知识,不能完全自动化
- Nimble:在一个大形状上预计算,然后在别的动态形状应用。问题是在一个大形状上的最优不一定可以泛化到别的最优。
- Bucketing:把形状变化区间分成子区间,然后用每个子区间的最大值作为值来计算一次。
- 需要额外计算形状信息,并且由于化简,带来计算不准确。
- 由于padding,会出现不必要的计算开销。
综上,已有方法都不好。
DietCode原理、关键因素
Shape-Generic Search Space
观察下面这个图:
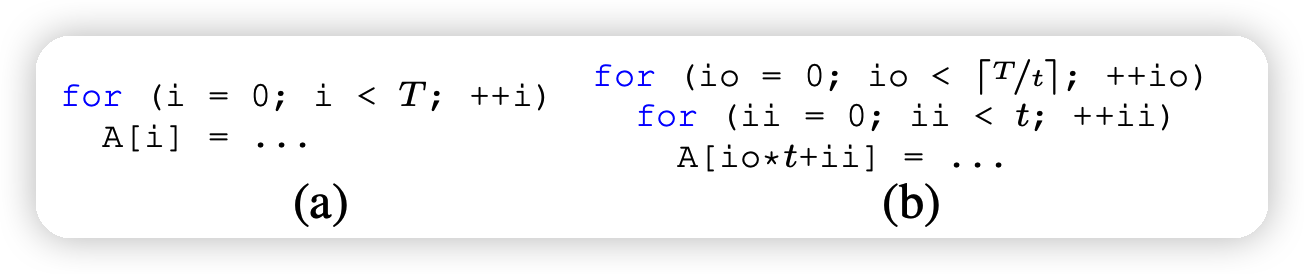
左边是一个含参数T的代码,右边是已有auto-scheduler的做法:
- 可见,他们只尝试了T的因子,比如\(T=49,t \in[1,7,49]\),显然比如t=10时就不准确。
本文,则考虑硬件约束下,给出了一些micro-kernel。这是符合硬件条件的一些算子,可以一个动态形状的运算可以视为一些micro-kernel的组合,比如下列运算: \[ Y = XW^T \\ X :[16*T,768] ,\quad W:[2304,768] \] 其中T是可变的参数。如果我们有一个运算器可以运算\(128*128\)的矩阵micro-kernel:dense_128x128。
当T=64时,由于\(16·T = 8×128, 2304 = 18×128\)可以把他们视为\(8*18\)的kernel的排列在一起进行运算,如图:
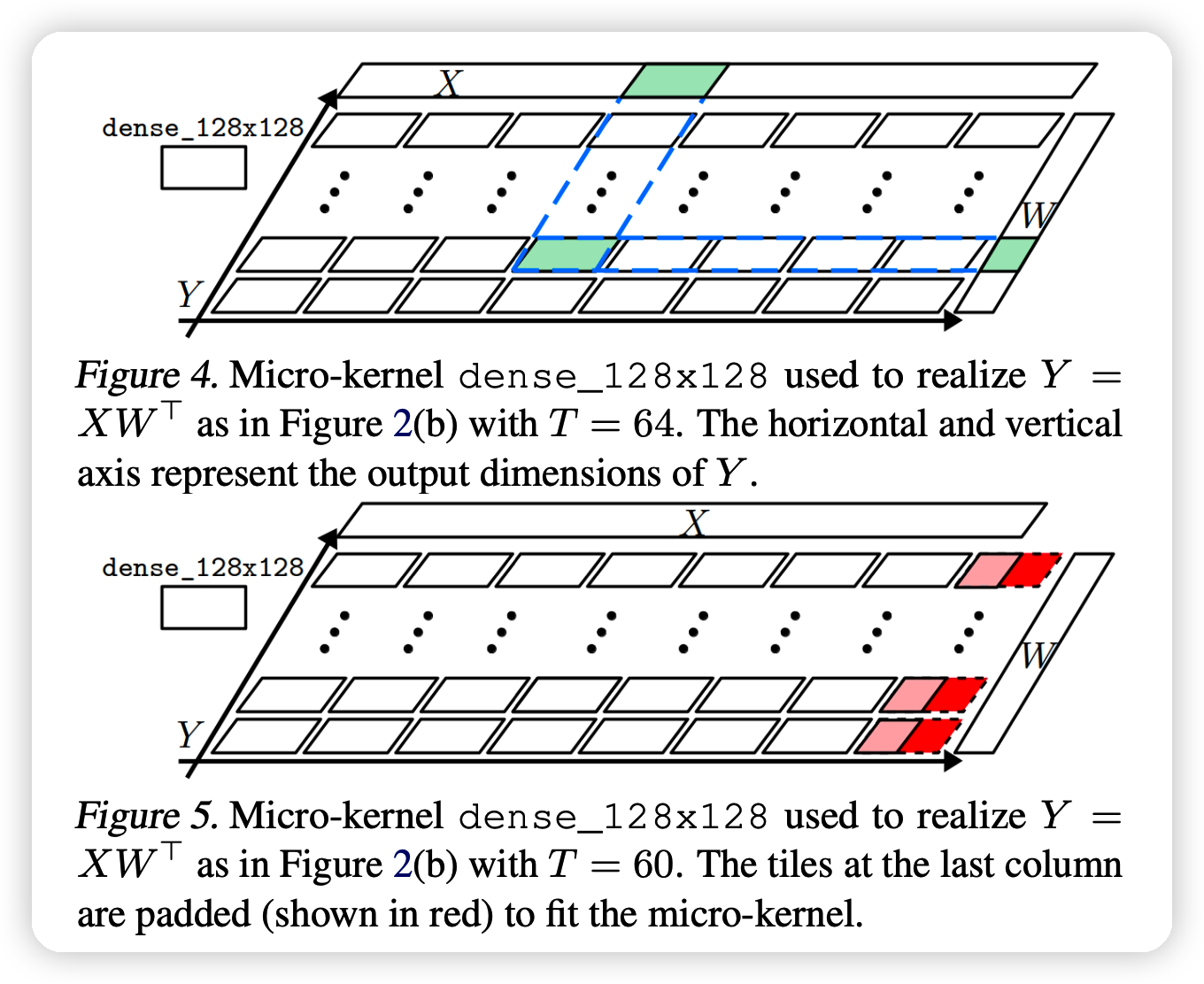
通过排布使用micro-kernel dense_128x128,我们对于\(T=1,2,...128\)都可以很方便的实现上面的运算。也就是说,通过这种设计,我们只需要使用形状无关的micro-kernel,就可以实现任意形状输入的优化
这种方法要解决几个问题:
- 如果T=60,那么就需要一个padding,如上图的下面。也就是说,会带来一些额外计算。要怎样高效利用所有micro-kernel?
- 怎样准确评判这种由micro-kernel构成的程序的效率?
Micro-Kernel-based Cost Model
上面说的第一个问题通过padding可以一定程度上解决。对于后一个问题,需要构建一个新的cost model。
已有的cost-model需要输入整个程序,从中抽取一些特征: \[ \text{Cost}(P ) = f (\text{FeatureExtractor}(P )) \\ f : \text{cost function (e.g., XGBoost)} \\ P : \text{complete program } \\ \text{Cost} :\text{ compute throughput} \] 但是,由于micro-kernel是程序的一种切片,不是整个程序,因此不适用传统cost model。
设计新的cost model,发现如果一个动态形状程序P被切片成很多micro-kernel M,那么cost可以拆解成两部分:
- \(f_{MK}\):这些micro-kernel的损失。和形状无关(多个micro-kernel可以并行,时间是常数)
- \(f_{adapt}\) :把P切片成M带来的损失。和形状有关,但是计算很简单(比如上图就是算padding的比例)
\[ \text{Cost}_M(P)=f_{MK}(\text{FeatureExtractor}(M))·f_{\text{adapt}}(P,M) \]
式子的左边可以通过已有方法的公式计算,更重要的是,由于M和程序P无关,可以事先预计算。式子的右边计算速度很快。综上,新模型的计算效率很高。
Joint Learning with DietCode
本文提出了DietCode,基于以下要素:
- 一个Shape-Generic Search Space
- 一个Micro-Kernel-based Cost Model
- 在运行时通过上面的cost公式对确定的输入形状派发一种micro-kernel排列
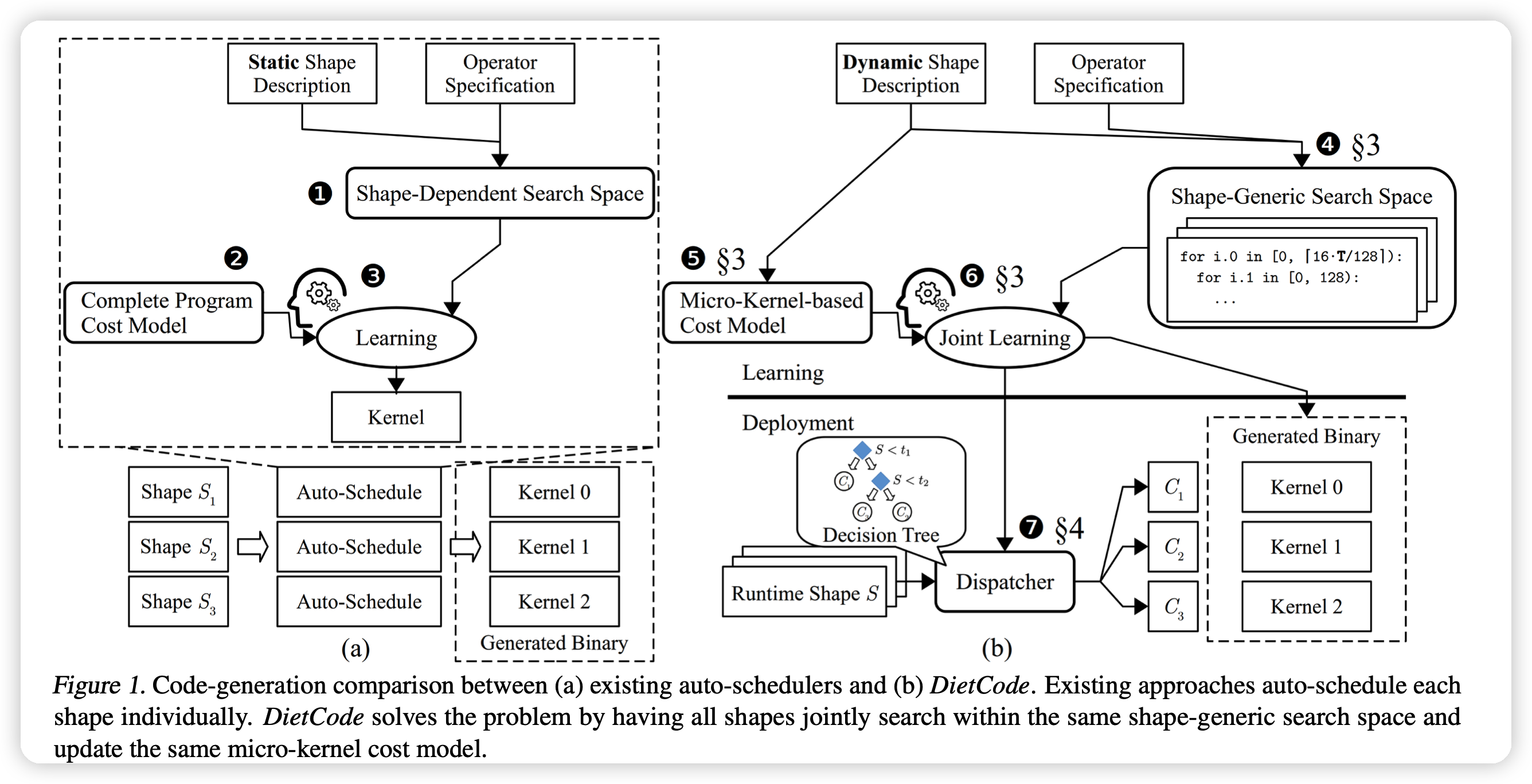
和已有方法对比如下图:
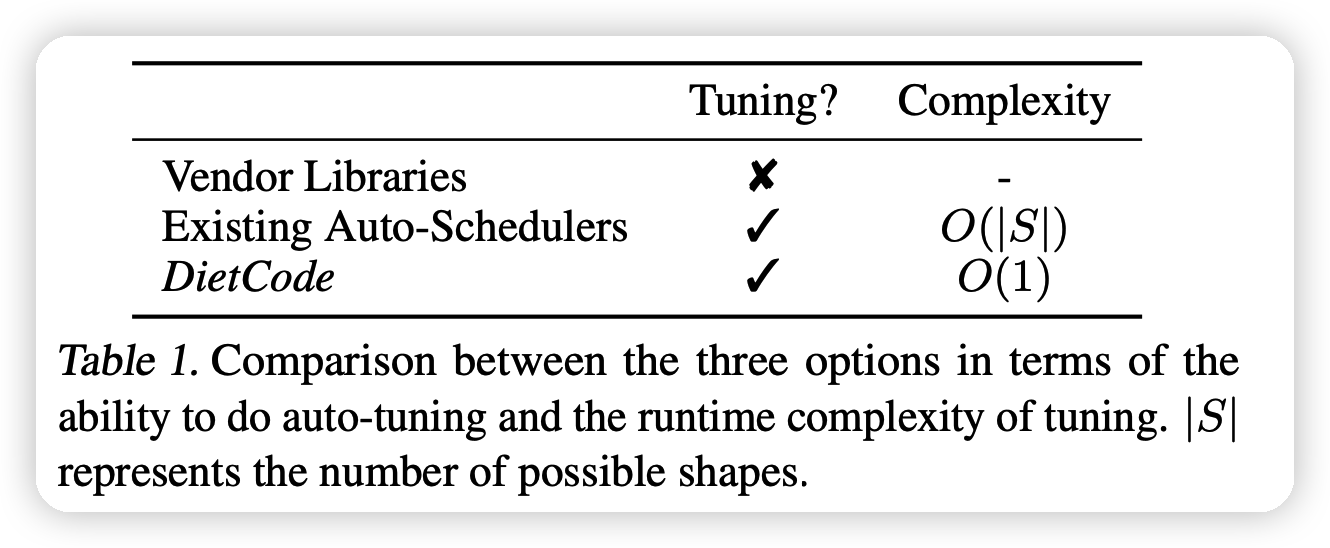
可以对所有categories同时学习,因为有统一的cost公式,复杂度是\(O(1)\)
实现细节
这种方法作为TVM的auto-scheduler方法
local padding
上面提到的由于使用padding,可能会带来性能下降,高达17倍。这是因为引入了很多的branch指令,而且每个branch都要计算数据。
作者研究了三种已有解决方法,举例子如下图,这个例子有一个数据读取,一个数据修改,一个数据写回
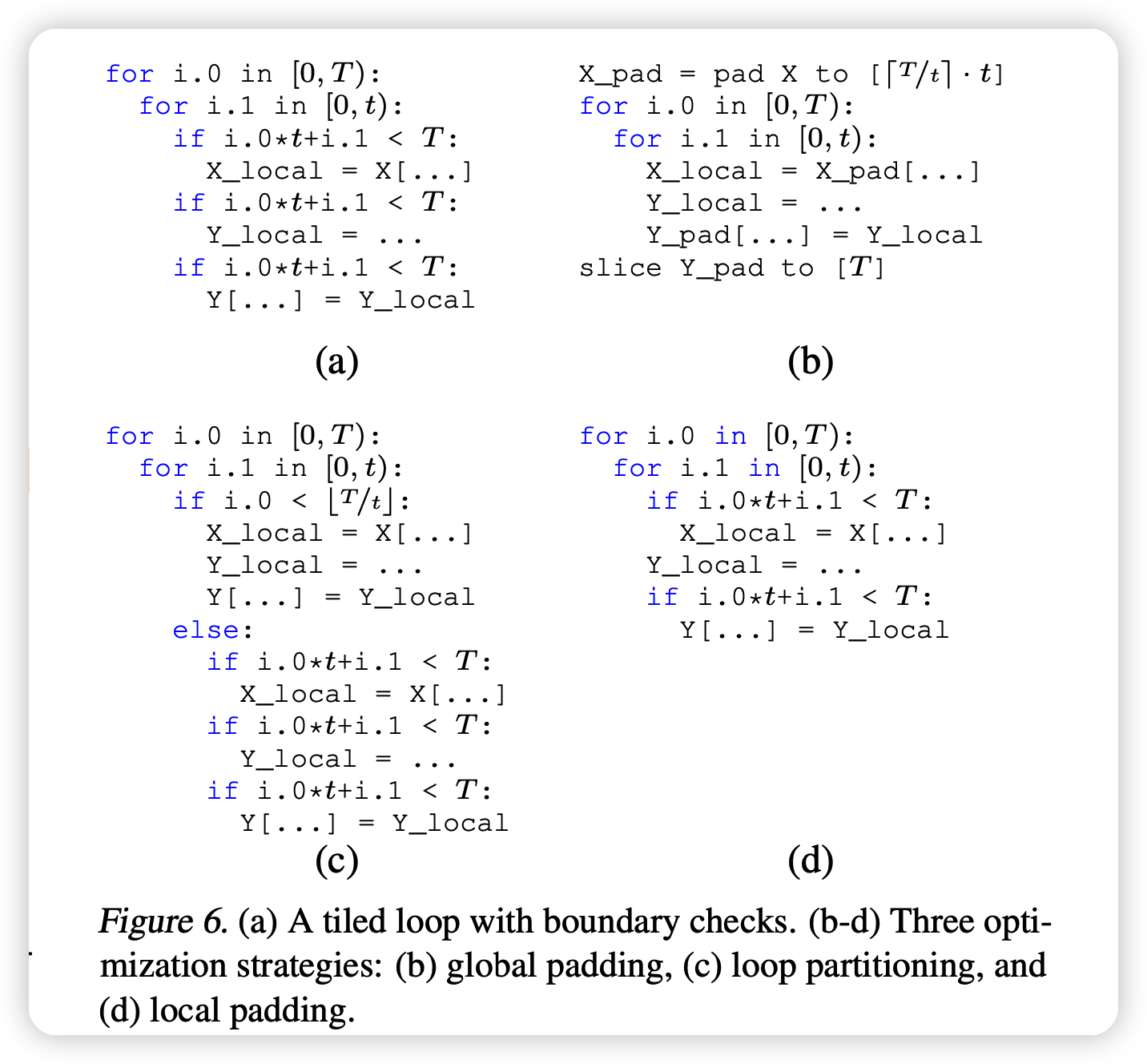
- global padding:如b。提前算好,不需要在里面做branch,但是需要引入额外的存储空间和padding结果的运算
- Loop partitioning:如c。把程序切成两片,其中上一片无论如何都不会爆。当\(t \ll T\)时效果不错,但这个条件很难保证。
- local padding:
在取数据和写回数据时保证正确性,但是在计算时不保证。这个有两个好处:
- 只有计算阶段的branch会大幅影响表现。fetch和write back的时间可以被已有流水线技术优化掉
- 如果计算阶段算了额外算了padding的部分,写回阶段会把它忽略,因此不怎么影响表现
本工作使用local padding方法
Micro-Kernel-based Cost Model 具体实现
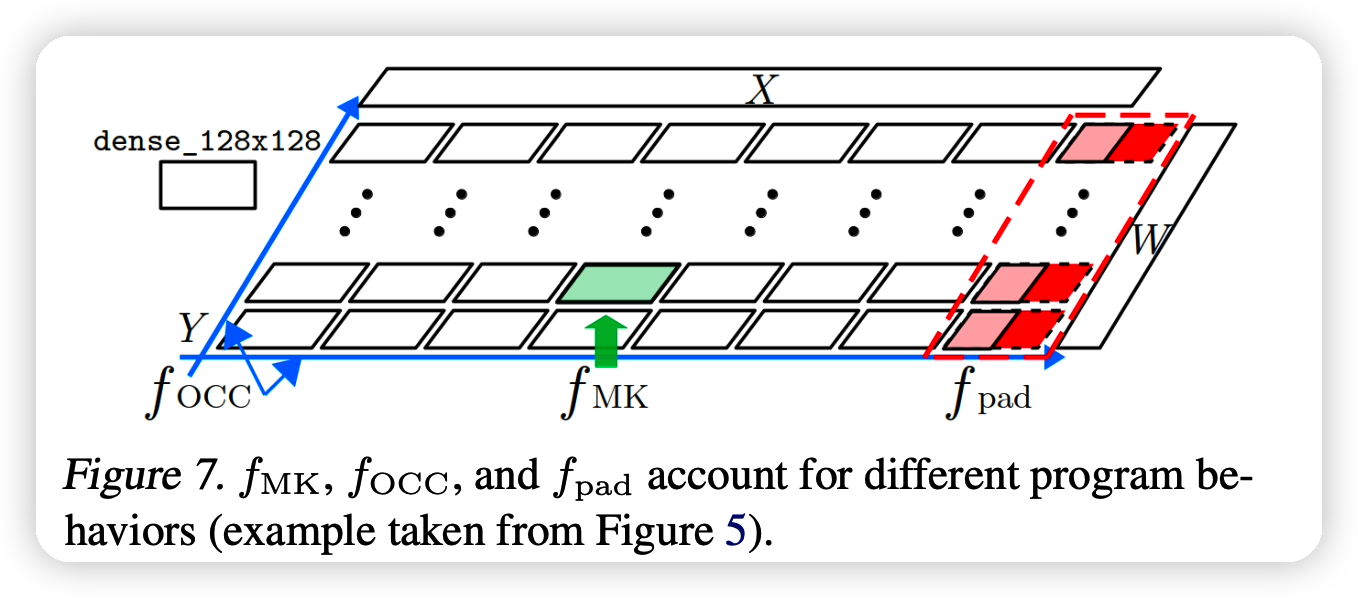
cost的计算应该考虑以下部分:
- 1、micro-kernel的表现
- 2、硬件占有率带来的惩罚,用的micro-kernel越多,瞬时的占有率高,吞吐量大,就是好。
- 3、padding带来的额外惩罚,padding的比例越低越好
这三部分可以这样理解:
最终公式如下:
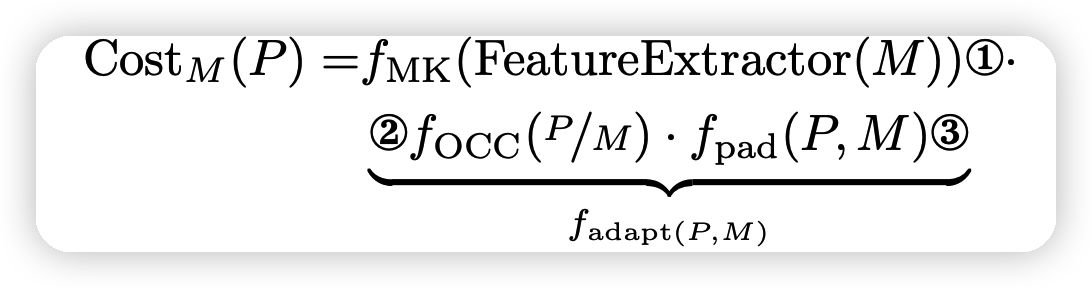
其中\(f_{PAD}\)和硬件无关,之和micro-kernel设计、程序P有关
其中\(f_{OCC}\)是占有率惩罚, 用一个回归模型预测
k,b是可学习的参数,由于每个micro-kernel被派发到不同的核,\(f_{OCC}\)也可以看做占了多少的核。如果做一个归一化的话:

可以节省一个参数b
Automatic Dispatching
在同时计算完所有的M以后,我们根据: \[ vote(S) = argmax_M(CostM(P(S,M))) \] 这个得分是和吞吐率成正比的,因此越高越好。用argmax
来对与特定的形状S派发一组micro-kernel的排列M,这个可以遍历。结束以后,我们把\(<S,vote(S)>\)做成一颗决策树,在运行时通过决策树决定M即可。
EVALUATION
这一部分就不详细讲了。简单说一下,就是测试BERT模型的表现,baseline是:
- vendor: cuDNN
- Auto-scheduler: Ansor
- dynamic code generation: Nimble。进一步优化Ansor,计算最大形状,然后应用在所有形状上
评测指标,全都是越小越好:
- end-to-end latency on the entire model, measured as msec。
- the runtime cost of the generated tensor programs on a single operator, measured as μsec and averaged over 100 runs。
- the total auto-scheduling time used, measured as hours
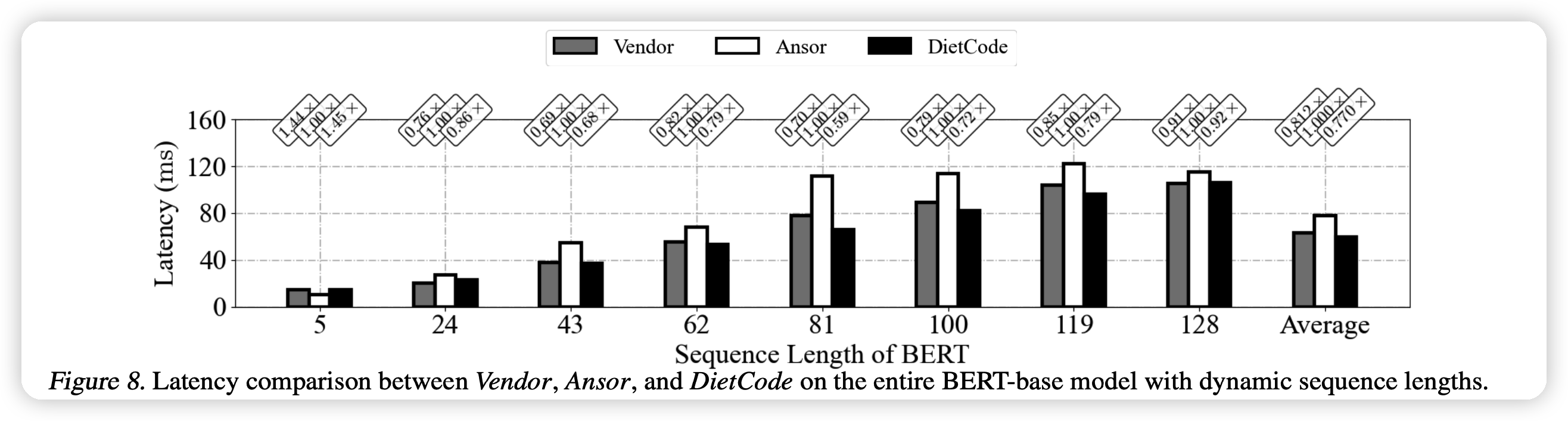
上面这个图可以看出,对于不同的输入维度,DietCode的效果基本最好。同时和vendor的差距小,但是vendor需要人工大码量、长时间的开发。
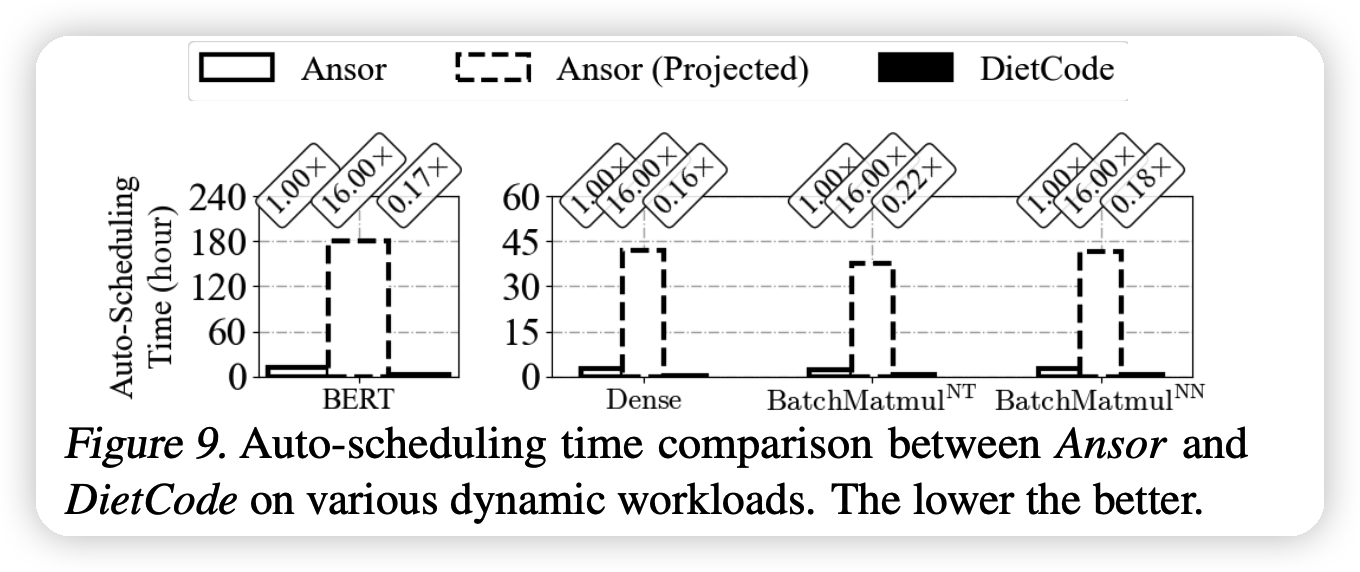
上面这个图是编译时间,虚线代表理论推导,实际根本不可行。可以看出,DietCode非常快。
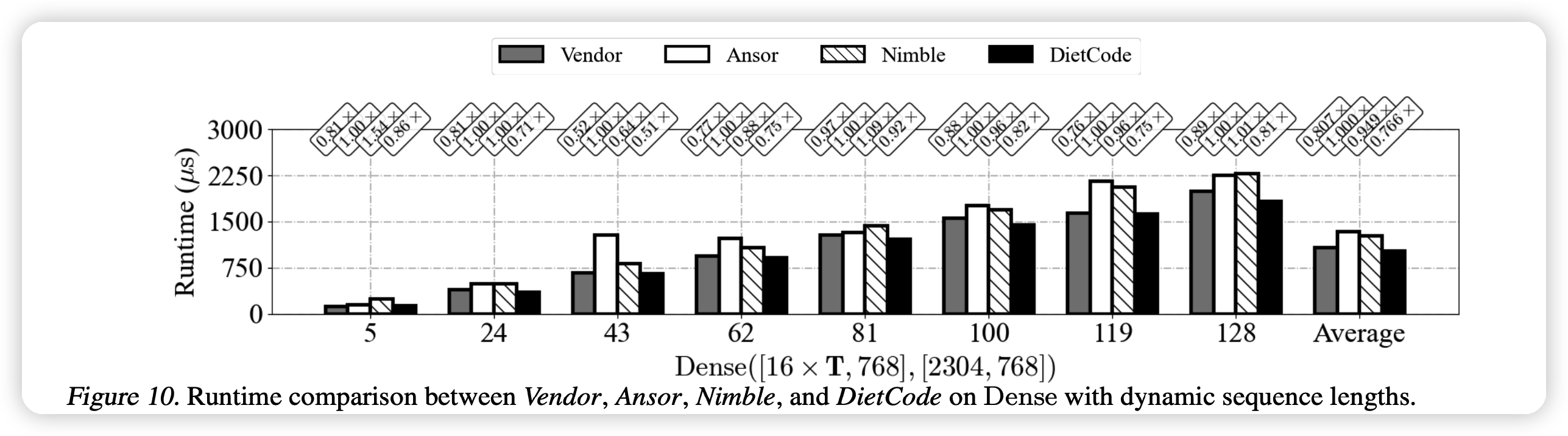
上面这个图是指选定某种结构以后,真正的跑的速度。更快。作者测试了dense层(一个动态量),batchmatmul层(2个动态量),效果都更好。
我的思考
- 其实我之前也不知道这种“动态形状”的输入是怎么规划的。但我确实感觉到动态形状的支持应该是必要的,基本所有的NLP问题都需要这个。
- 看作者的意思,这个功能现在已经上TVM了,我在想这个是不是和操作系统一样:
先有实现,后有理论
- 后续我可能会继续调研一些TVM的原理,感觉还是挺神奇的。