今天分享一篇最近挂arXiv的很有意思的工作,是讲用diffusion模型来做optimizer优化的。
作者团队是伯克利,一作其实是做CV的,他的GAN-Supervised Dense Visual Alignment在今年CVPR上获得了Oral
Best Paper
Introduction
首先要说一说什么是optimizer
optimizer就是负责优化模型的。它持续的接受当前模型的参数和本次的梯度,然后负责进行模型参数的更新。可能会利用模型历史参数的信息来做一些类似momentum的方法。
作者在这里提到一些已有的设计好的优化器manual optimizer比如SGD,ADAM,它们面临的问题优化速度很慢,不能从过去的经历中学到东西。这个”过去“是指过去的run。比如说你用同一个初始参数来初始化模型,用同一个数据集训练。跑100次,第一次和第100次都是需要同样多的epoch才能收敛。
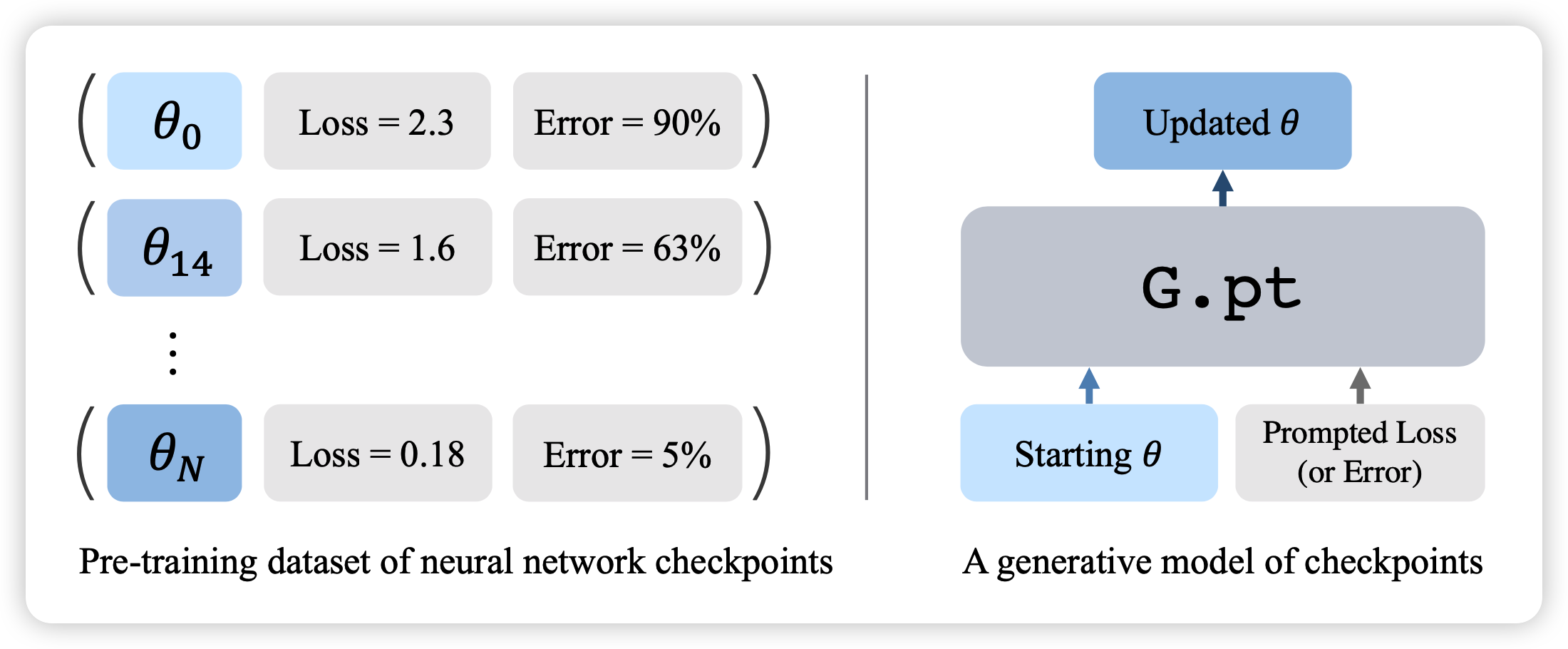
于是作者开始递归了……能不能训练一个优化器来优化模型,这就是learning to learn的意思。希望可以从一些已有的checkpoint作为数据集(大小23M),其中含有模型参数、模型初始参数、每个状态的loss、Error、Return等信息。是的,不含有梯度信息,只是单纯的loss,因此RL的score也在这个范围内。同时作者训练一个G.pt(generative
checkpoint)模型来输入最开始的参数\(\theta_0\)和希望到达的loss,让模型快速地输出目标参数。在这里,作者非常巧妙地用到了diffusion训练框架,后文会提到。
总体而言,这个方法有如下优点:
- 可以对不同的初始化参数通过1次更新就得到很好的效果
- 它可以非常方便的对各种大小的loss都能更新出来
- 对于out-of-distribution的初始化方法,效果也不错(diffusion能力?)
- 对于不可导的loss比如RL的score,也能出结果。
Method
总体算法如下图所示:
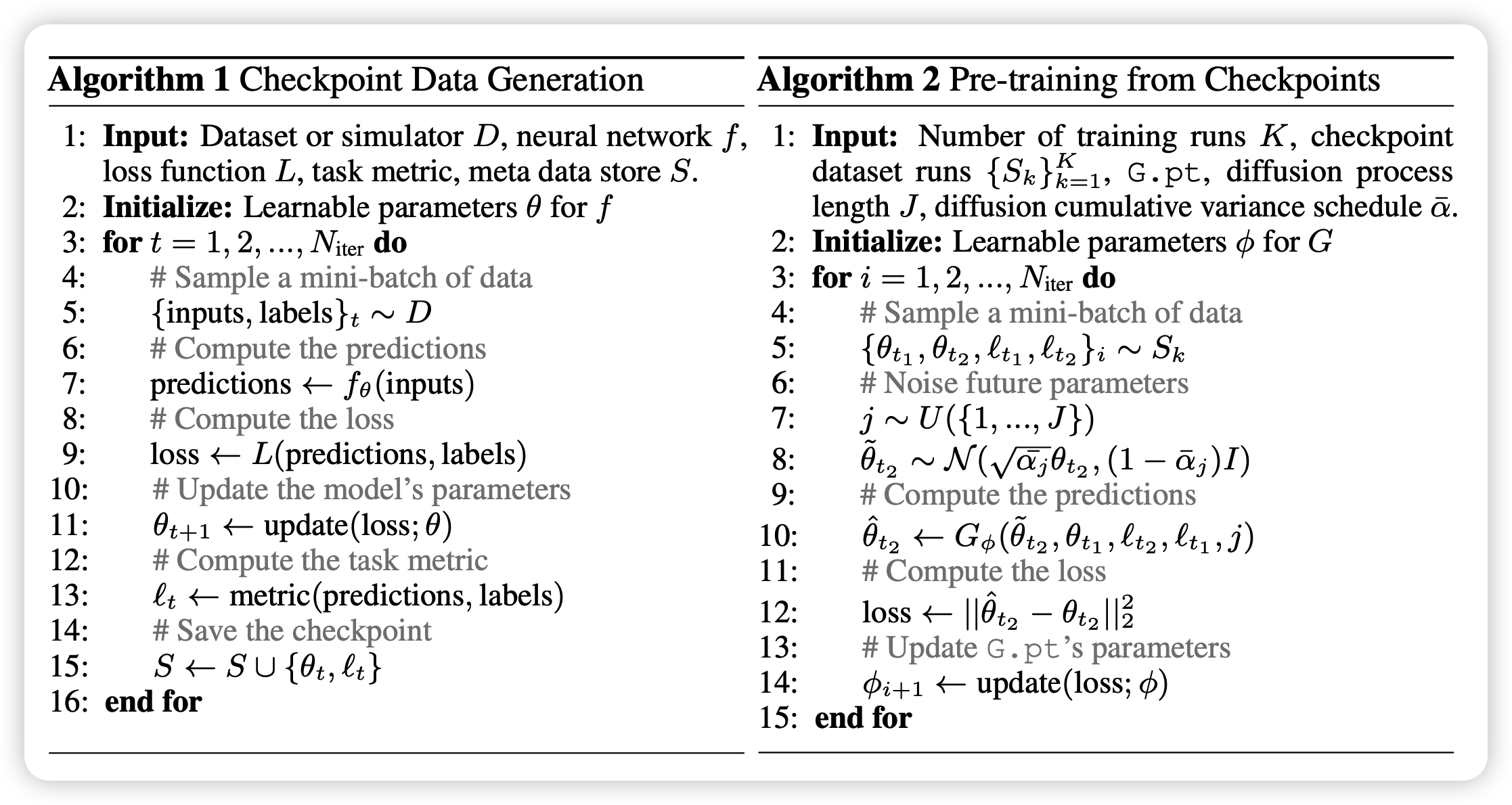
首先是如何制造这个数据集
数据集里的每一个checkpoint组其实是一次running里的多个checkpoint,就是把模型正常的训练一下,然后最终每个running都采样一些
由于数据很大生成很慢,可以思考进行数据增强
比如permutation,连续两个矩阵运算,两边的参数分别左乘右乘互逆的交换阵,就是一个等价的模型。
比如大小变换也是,前面所有参数乘2,后面的除以2,还是等价模型。
总之,作者最终获得了一个从MNIST, CIFAR-10数据集训练MLPs, CNNs结构的10万次running里的23M个checkpoint
G.pt是什么样子
training and sample
在训练时,可以知道一个模型的初始参数\(\theta_0\)与初始loss \(L_0\)。同时还有后面某个step的参数\(\theta^*\)和loss \(L^*\)
接下来,先把\(\theta^*\)按diffusion时间j进行noise变成\(\theta_j^*\),然后使用diffusion的训练方式: \[ \mathcal{L}(G) = \mathbb{E} \left[|| \theta^* - G(\theta_j^*, \theta_0, L_0, L^*, j) ||^2_2 \right] \]
有个小细节,在这里,作者的模型G.pt是预测参数\(\theta_j\),而不是noise或者什么,这个方式叫做predict signal
作者在后文提到了另一个细节Training on intermediate checkpoints improves one step training。也就是说在选取训练batch的时候,初始\(\theta_0\)可以不是真的初始参数,然后目标参数\(\theta^*\)也可以是训练中间的一个参数,这样会使得G.pt总体表现提升50%
训练结束以后,模型直接输入一个新的初始参数\(\theta_0\)和\(L_0\),然后构造一个比较低的prompt Loss,让模型跑一次,就行了(这个一次,是指一次diffusion采样,可能会很多T=1000)。作者sample公式使用DDPM传统公式
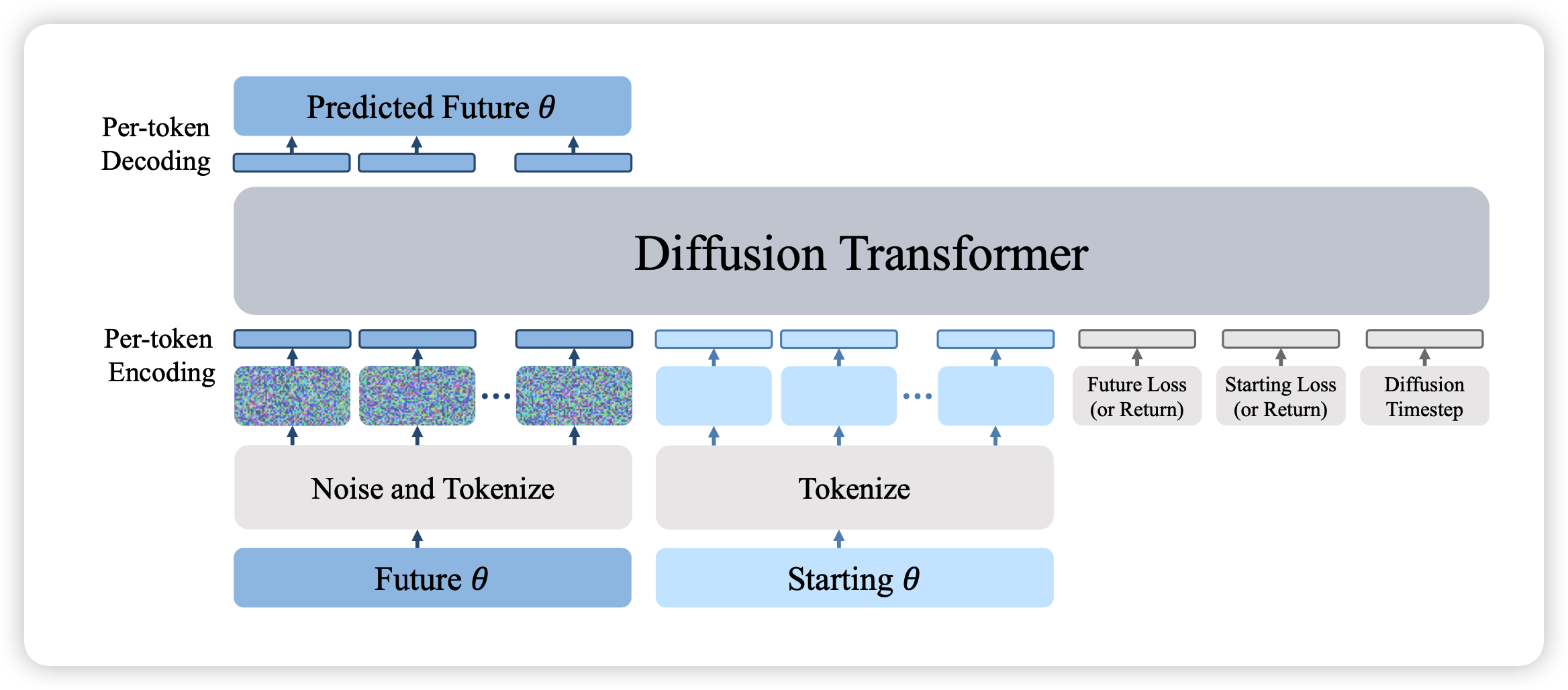
tokenize
G.pt需要输入模型参数,参数要如何表示,作者考虑了NLP里tokenize的方法,把模型的每个layer变成M维token(超过M就用多个chunk一下)。
注意,所有的时间j,loss L, return R,error E作为单独的token也要输入进去
接下来,作者有个小细节,tokenize完以后要用一个MLP全连接过一次,每个token的MLP是不共享参数的
gpt 2
后面,就直接把模型扔进一个gpt 2结构做一次decode。作者提到去掉了casual mask,这是因为模型应该需要看到”未来“,知晓所有信息
然后把前面\(\theta_j^*\)位置的next token prediciton的结果拿出来,再过一个不共享参数的MLP作为模型的输出
Global residual connection
作者提到,模型本身的输出还有一个全局的残差连接。然后模型其实是预测\(\theta^* - \theta_j^*\),同时让模型的参数按照全0初始化,也就是总体而言是一一映射初始化。
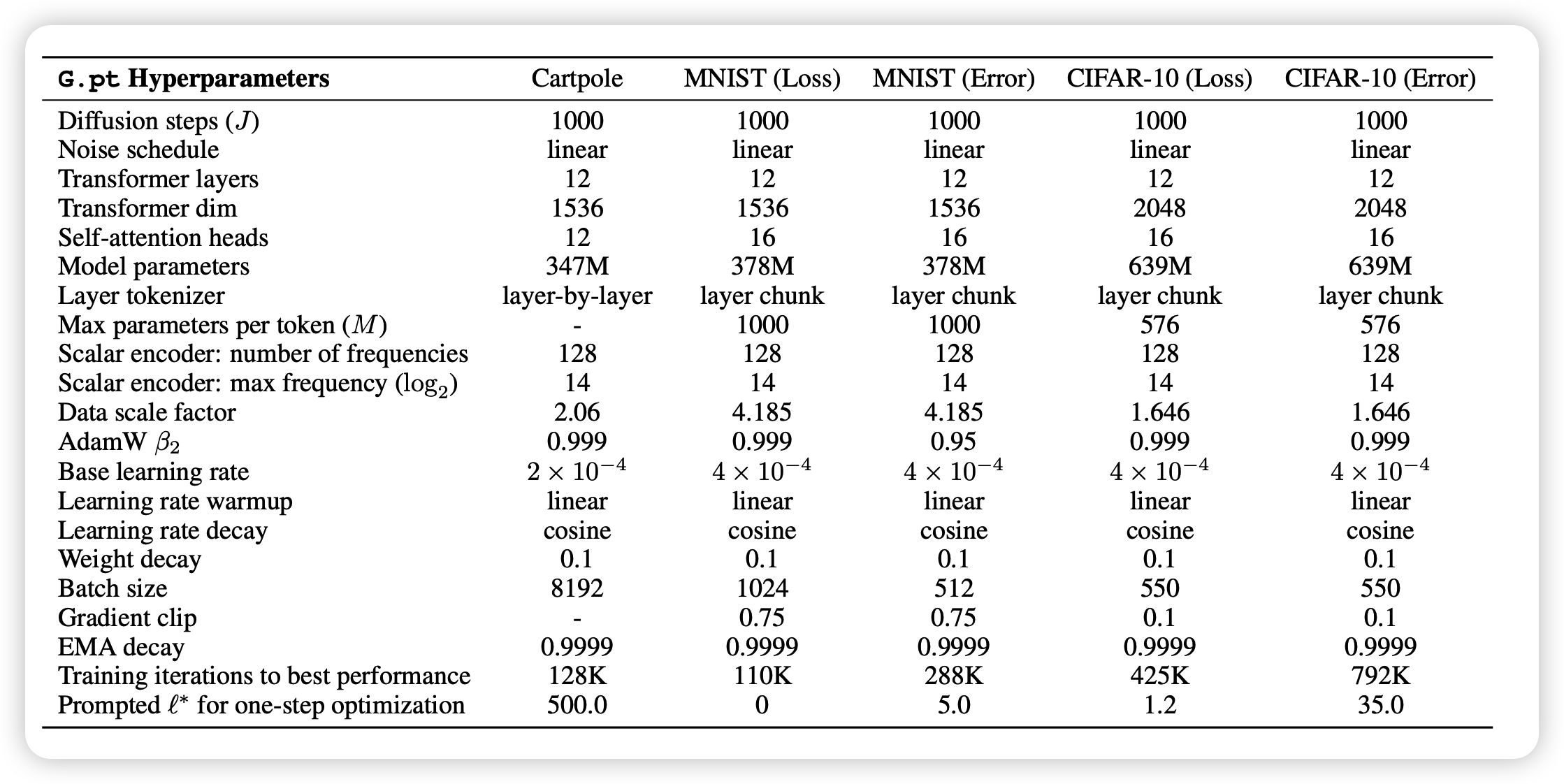
超参如上图,可以看出作者的G.pt模型其实不小,训练时max length应该有几千,还是挺烧卡的。
Experiment
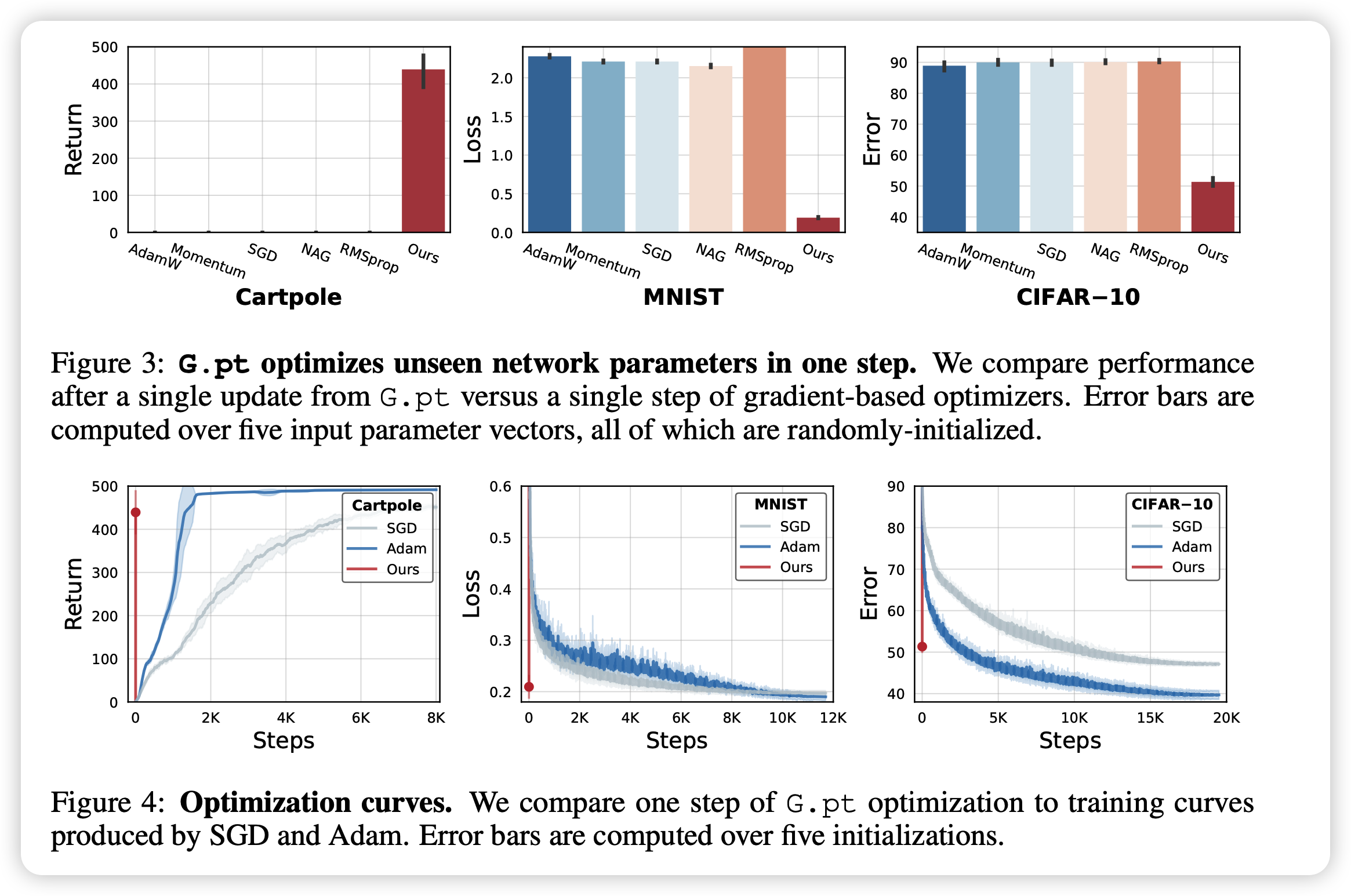
作者首先摆出来了一次sample的结果,G.pt给的prompt loss在上面的超参的图里。
可以看出传统优化器一次sample基本啥效果都没有,但G.pt效果已经不错了。后面一行是传统manual optimizer训练曲线,红线是G.pt一次的结果,看起来G.pt一次顶传统optimizer炼1个小时。
多次的持续sample,每次prompt loss低一些效果怎么样呢?
- 对于初始化方法接近的模型,第一次效果基本就可以了,再来一次效果差距不大
- 对于out-of-distribution的数据,多次sample的效果更好
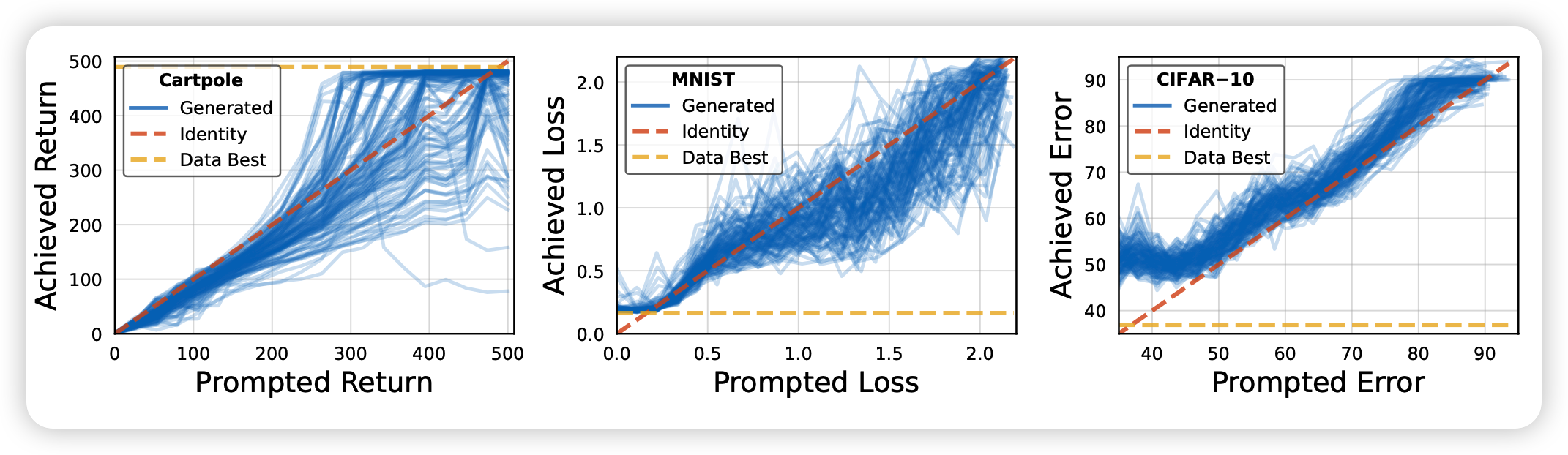
另一方面,作者也考察了输入不同prompt模型输出的准确度,可以看出对于不同的prompt loss,模型输出的目标参数对应的loss,确实比较接近prompt。
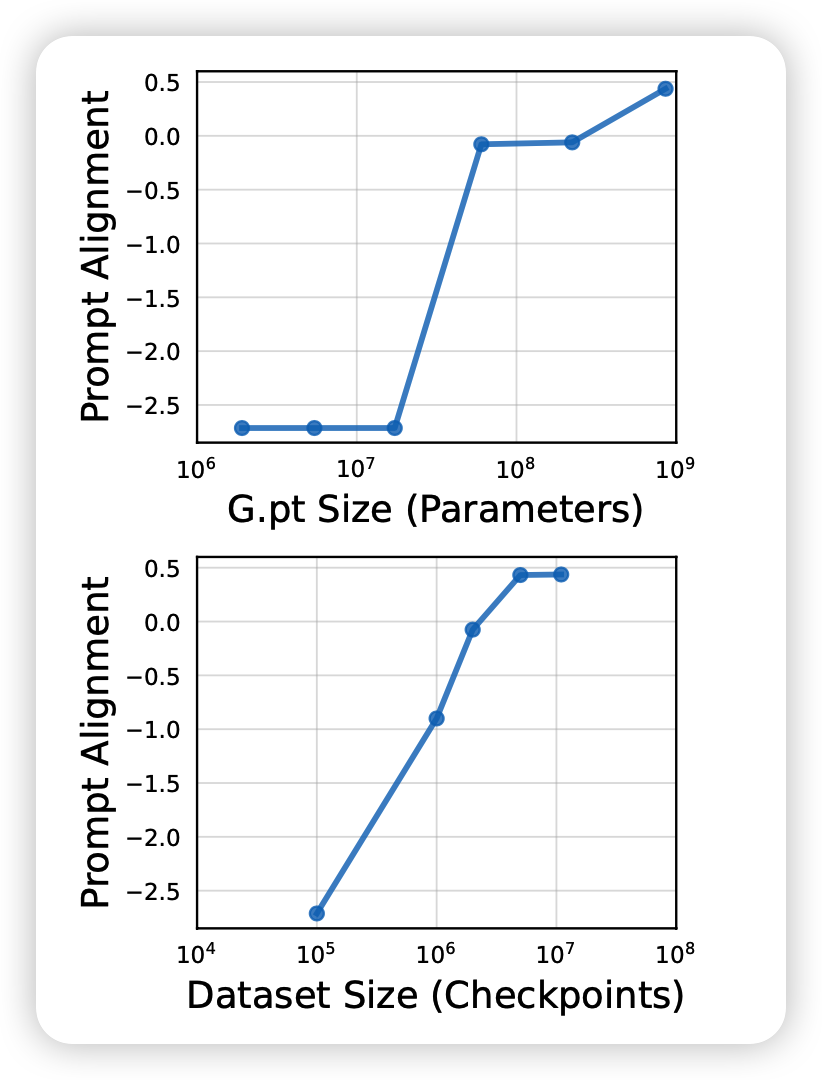
接下来作者做了个很有意思的实验,首先作者探索扩大模型规模对结果的影响(10M-800M),发现基本是线性的。同时对比了扩大数据规模的影响,发现基本触顶了,这说明的G.pt结构的能力还可以被大模型进一步的发挥。这个实验设计很有意思,参考了
我的思考
- 这个工作一看就是很好的工作,diffusion泛化能力的又一体现,让人看了就觉得自己可以follow一下。研究的问题也很有实际意义
- 全局残差连接是不是成功的关键?连接起了diffusion框架里prediction noise/signal的问题,但作者没多说
- 我个人感觉这个最少是2023 ICLR oral,没准是best paper。现在放arXiv应该是赶ICLR投稿