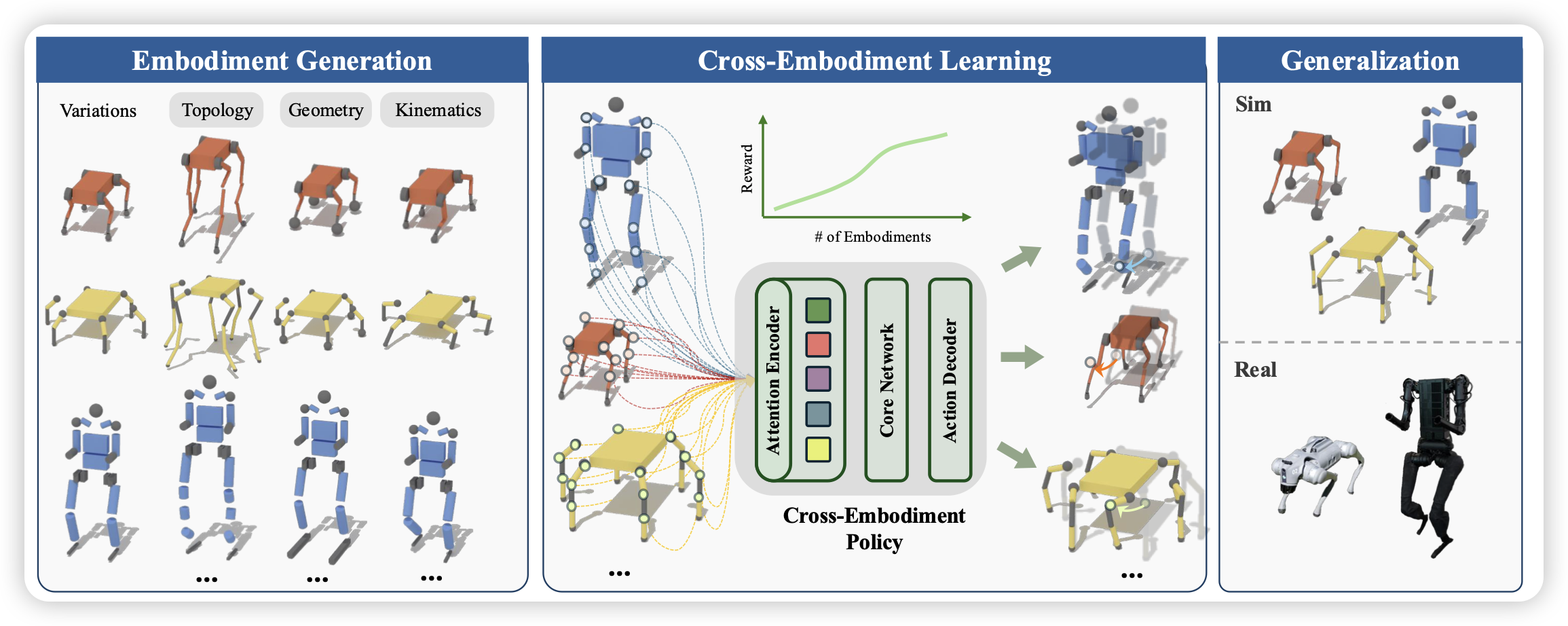
2025-05-12-insights 发表于 2025-05-12 更新于 2025-05-15 分类于 Arxiv-Insights 阅读次数: Valine: 本文字数: 137 阅读时长 ≈ 1 分钟 Towards Embodiment Scaling Laws in Robot Locomotion 作者研究了具身领域多机器学习的泛化性:搭建1000种不同的机器人形态,用一个模型训练,能在第1001种形态上泛化吗?作者发现总体上是有效的,而且比在少形态多数据的setting上有效。 相关文章 本月更新(Recent Update) arxiv-insights 2025-11-19-insights 2025-11-18-insights 2025-11-17-insights